朱祥维1, 沈丹2( ), 肖凯1,3, 马岳鑫1, 廖祥4, 古富强5, 余芳文6, 高柯夫7, 刘经南7
), 肖凯1,3, 马岳鑫1, 廖祥4, 古富强5, 余芳文6, 高柯夫7, 刘经南7
收稿日期:2023-02-17
修回日期:2023-03-20
接受日期:2023-03-31
出版日期:2023-10-15
发布日期:2023-04-11
通讯作者:
沈丹
E-mail:shend7@mail2.sysu.edu.cn
基金资助:
Xiangwei ZHU1, Dan SHEN2(), Kai XIAO1,3, Yuexin MA1, Xiang LIAO4, Fuqiang GU5, Fangwen YU6, Kefu GAO7, Jingnan LIU7
Received:2023-02-17
Revised:2023-03-20
Accepted:2023-03-31
Online:2023-10-15
Published:2023-04-11
Contact:
Dan SHEN
E-mail:shend7@mail2.sysu.edu.cn
Supported by:摘要:
脑与神经科学近几十年来的快速发展,初步揭示了动物导航的神经机理。借鉴大脑神经结构及信息处理机制,研究类脑仿生智能导航系统,为复杂环境下低功耗高鲁棒的自主智能导航提供了新的灵感。在详细综述了动物空间导航神经机理基础上,概述探讨了当前机器人仿生类脑导航智能算法,从利用脑启发的神经网络方法处理导航信息实现智能导航的角度,归纳为吸引子神经网络、深度强化学习以及脉冲神经网络等3类算法。接着梳理了类脑导航的实现途径,包括仿生智能传感器和智能类脑处理器平台。最后归纳并展望了类脑导航发展趋势,包括进一步探索生物界导航的脑神经机理及其信息处理过程、细分类脑导航概念内涵、评价指标完善的途径和统一实现框架。
中图分类号:
朱祥维, 沈丹, 肖凯, 马岳鑫, 廖祥, 古富强, 余芳文, 高柯夫, 刘经南. 类脑导航的机理、算法、实现与展望[J]. 航空学报, 2023, 44(19): 28569-028569.
Xiangwei ZHU, Dan SHEN, Kai XIAO, Yuexin MA, Xiang LIAO, Fuqiang GU, Fangwen YU, Kefu GAO, Jingnan LIU. Mechanisms, algorithms, implementation and perspectives of brain⁃inspired navigation[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(19): 28569-028569.

图 1
大鼠大脑海马体和内嗅皮层及相关脑区示意图[10-11]
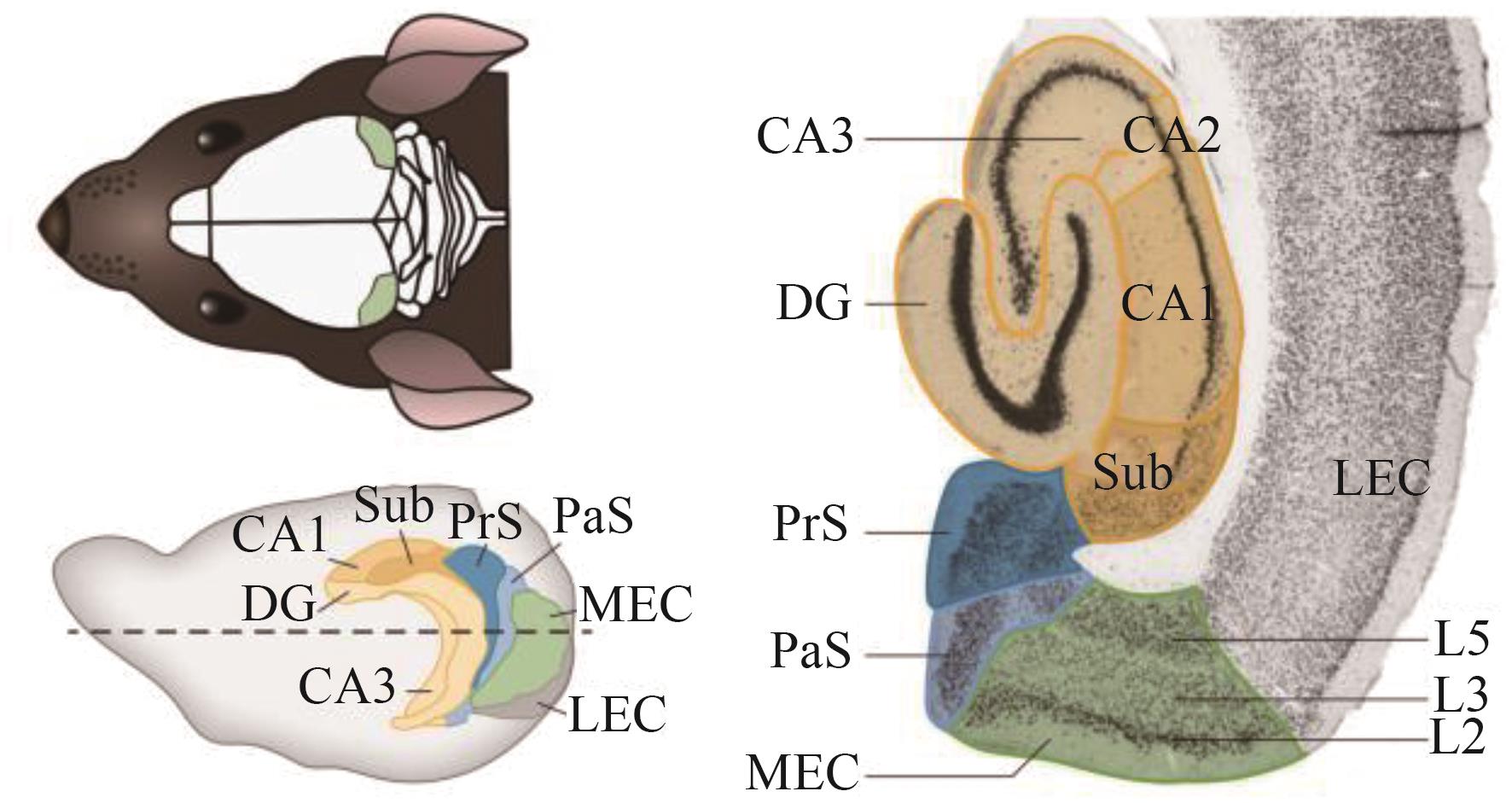
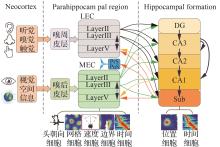
图 2
内嗅皮层与海马体等脑区的主要信息传递回路[10-12]


图3
大鼠大脑海马体中的位置细胞[16]

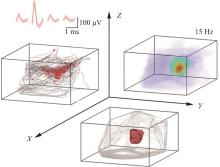
图4
蝙蝠海马体中3D位置细胞[19]


图5
大鼠大脑中的头朝向细胞[28]
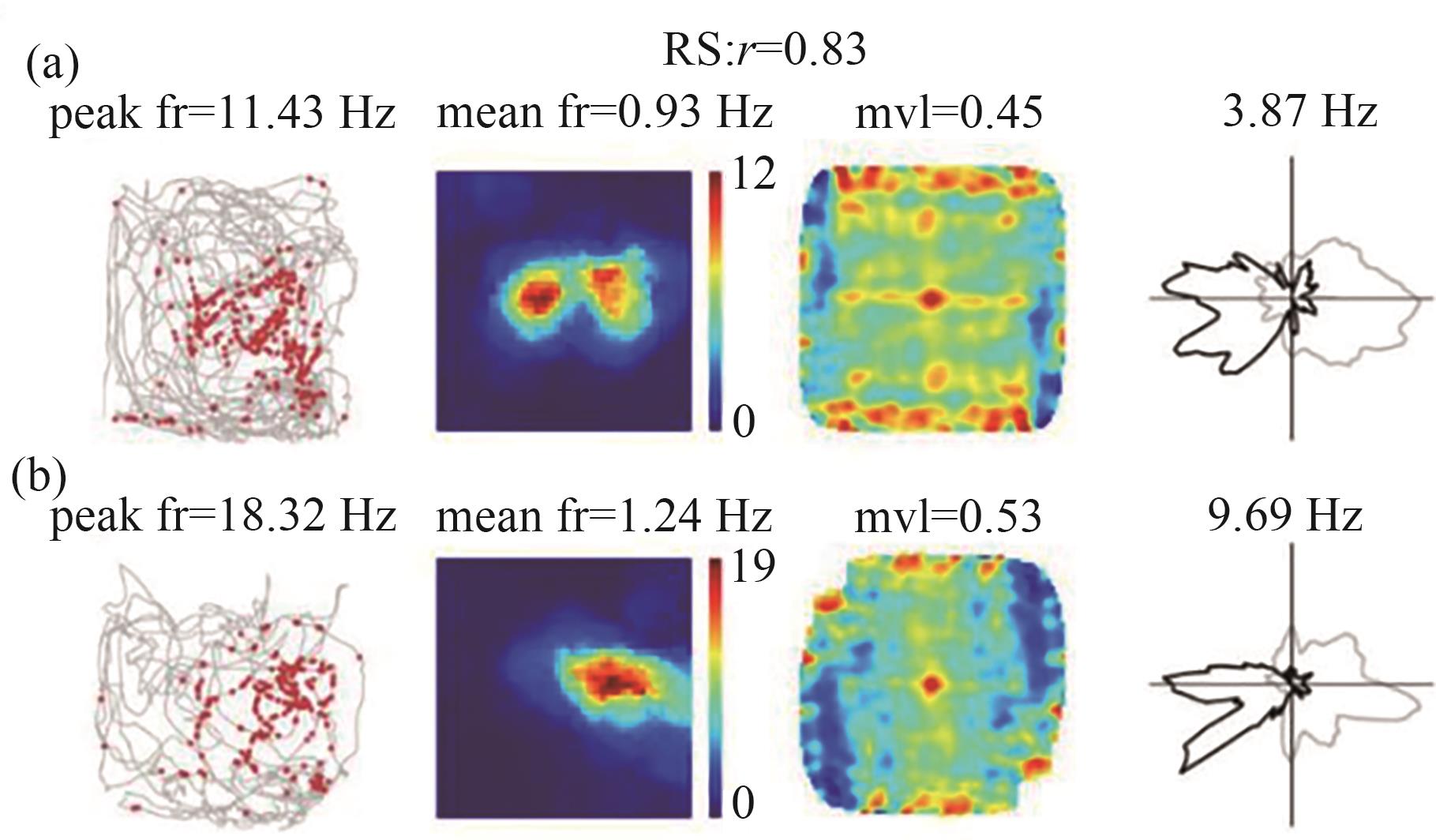

图6
蝙蝠大脑中的三维头朝向细胞[32]
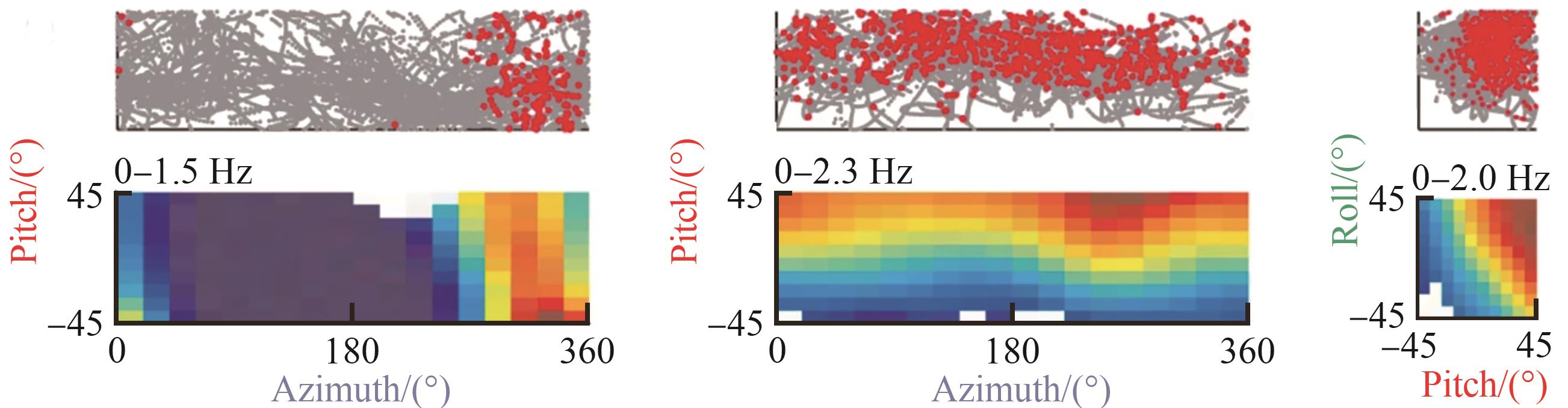

图7
大鼠大脑内嗅皮层中的网格细胞[16]


图8
蝙蝠大脑中的3D 网格细胞放电频率图[44]
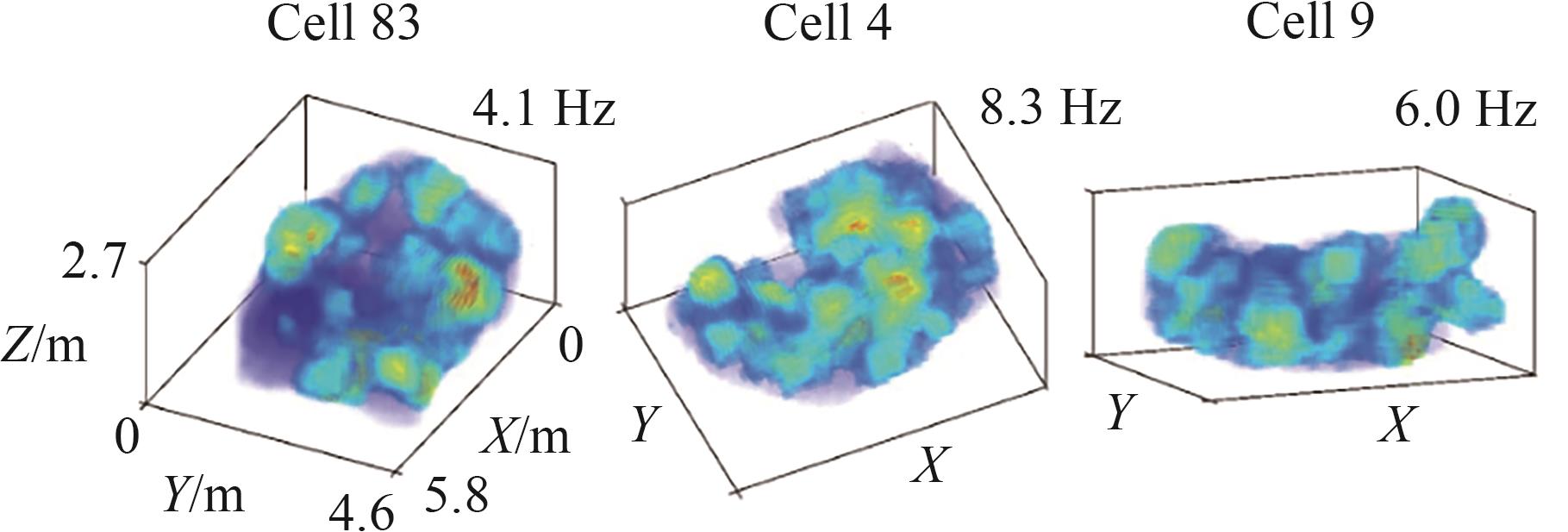
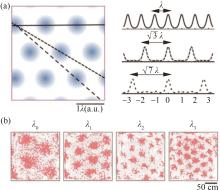
图9
网格细胞的多尺度特性[46]


图 10
大鼠海马旁皮质的线速度细胞[56]
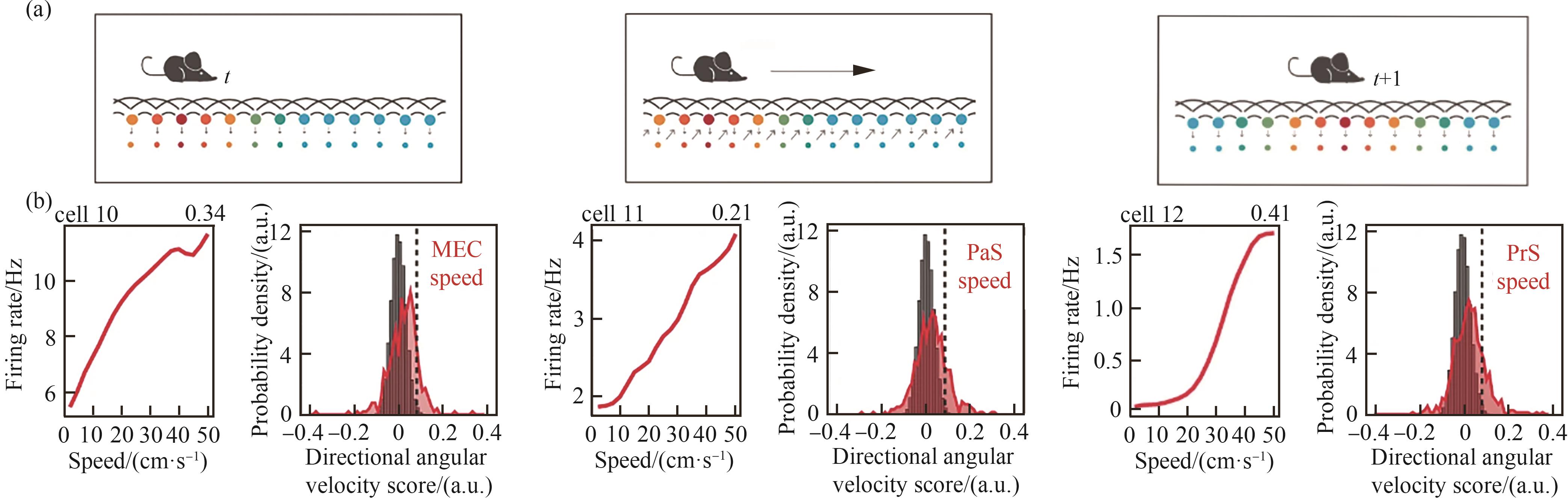

图11
大鼠海马旁皮质的角速度细胞[56]

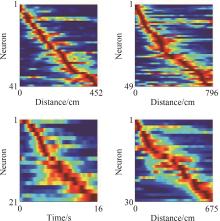
图12
大鼠海马体时间细胞[58]
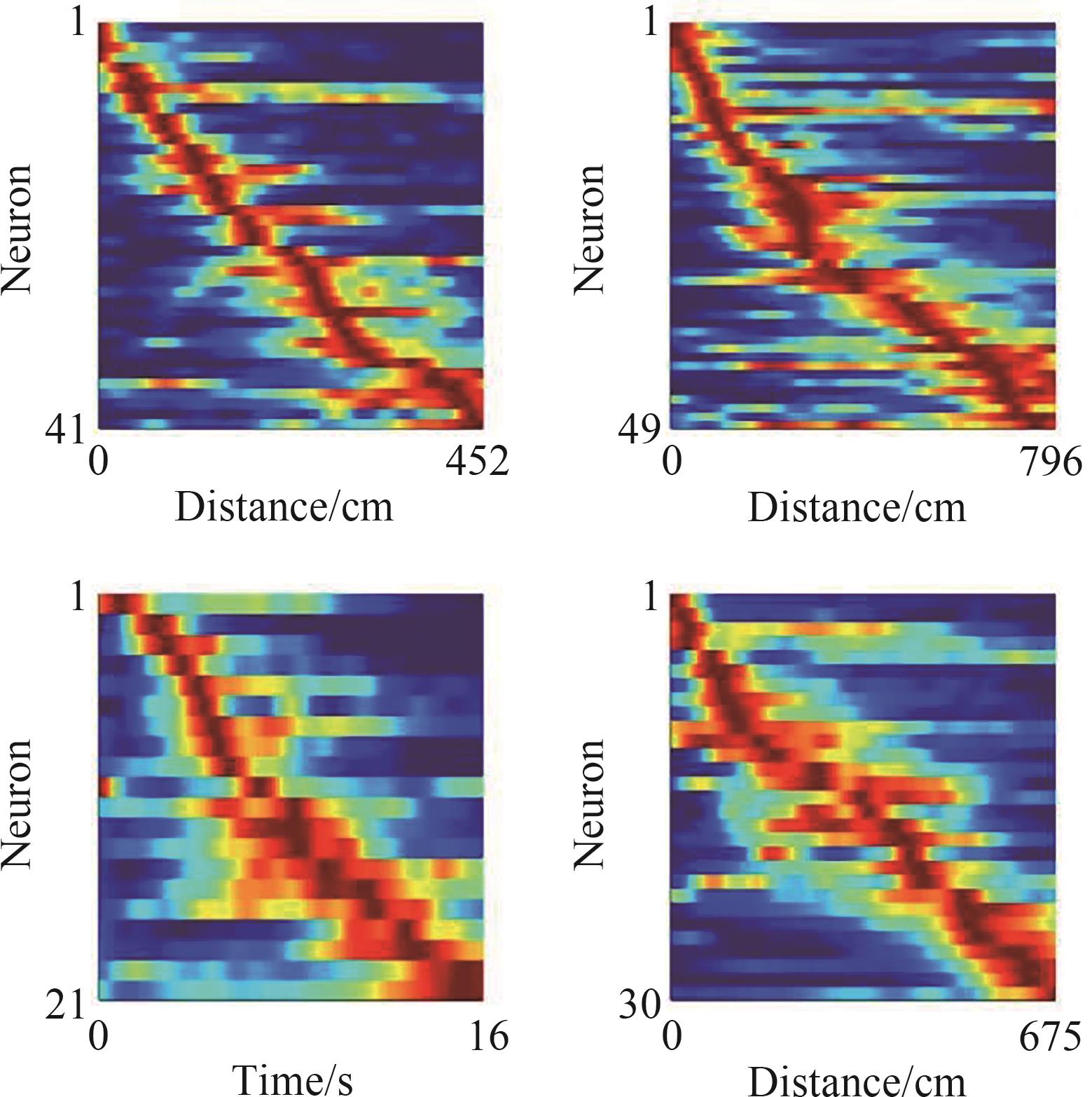

图 13
人类大脑时间细胞的多尺度特性[62]


图14
大鼠大脑中的边界细胞放电频率图[15]


图15
动物导航与类脑机器人导航的关系

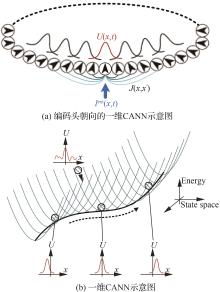
图16
一维CANN模型[76]

图17
NeuroSLAM系统总体框架[75]


图18
基于深度强化学习的路径积分算法框架与算法隐节点表征[77]


图19
脉冲神经网络[142]


图20
在规划和建模任务时位置细胞放电示意图[158]


图21
基于SNN的路径整合与建图的系统框架[163]
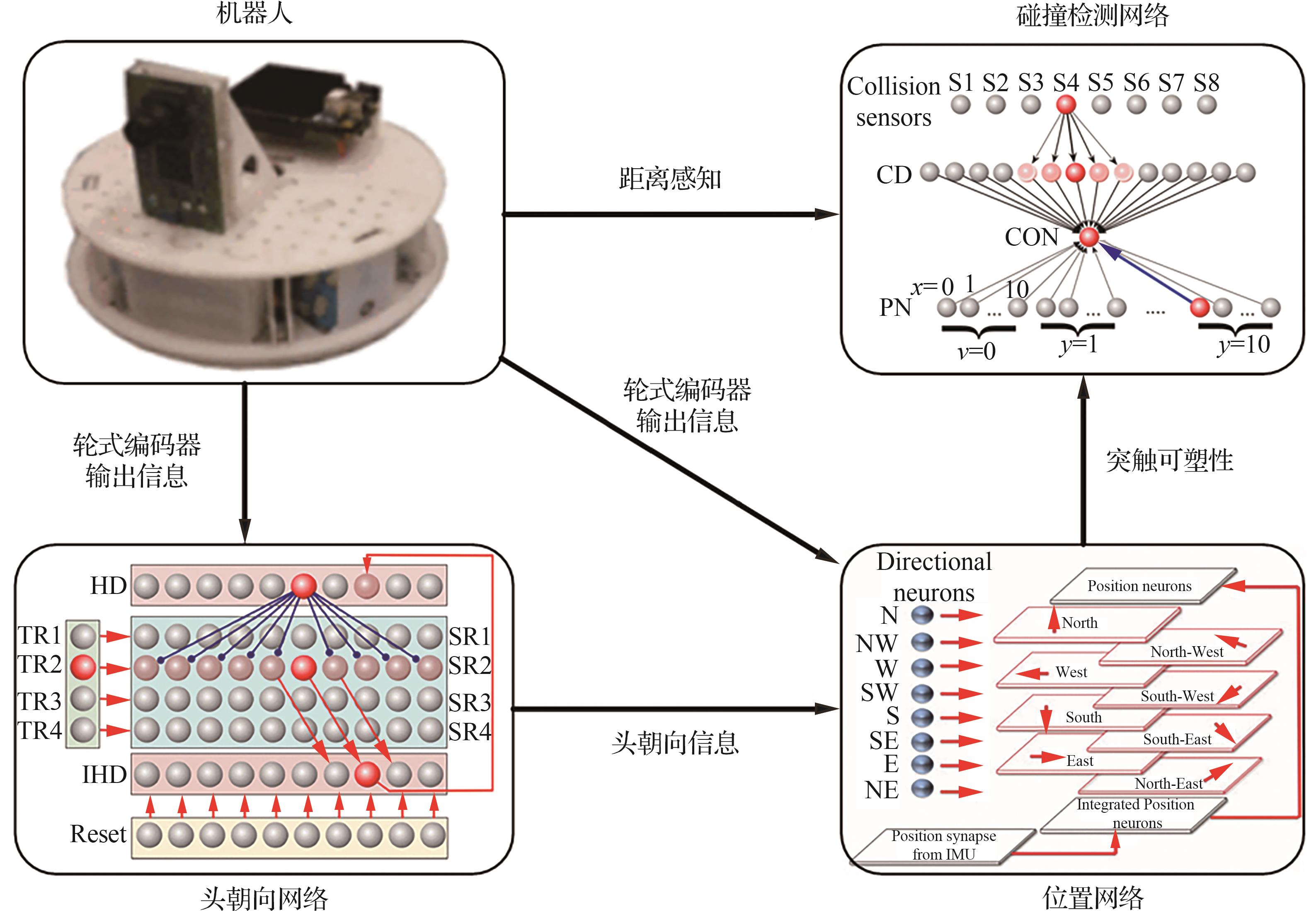

图22
自然界中2种典型的视觉系统[169]


图23
基于相机的面测量式仿生光罗盘[176]
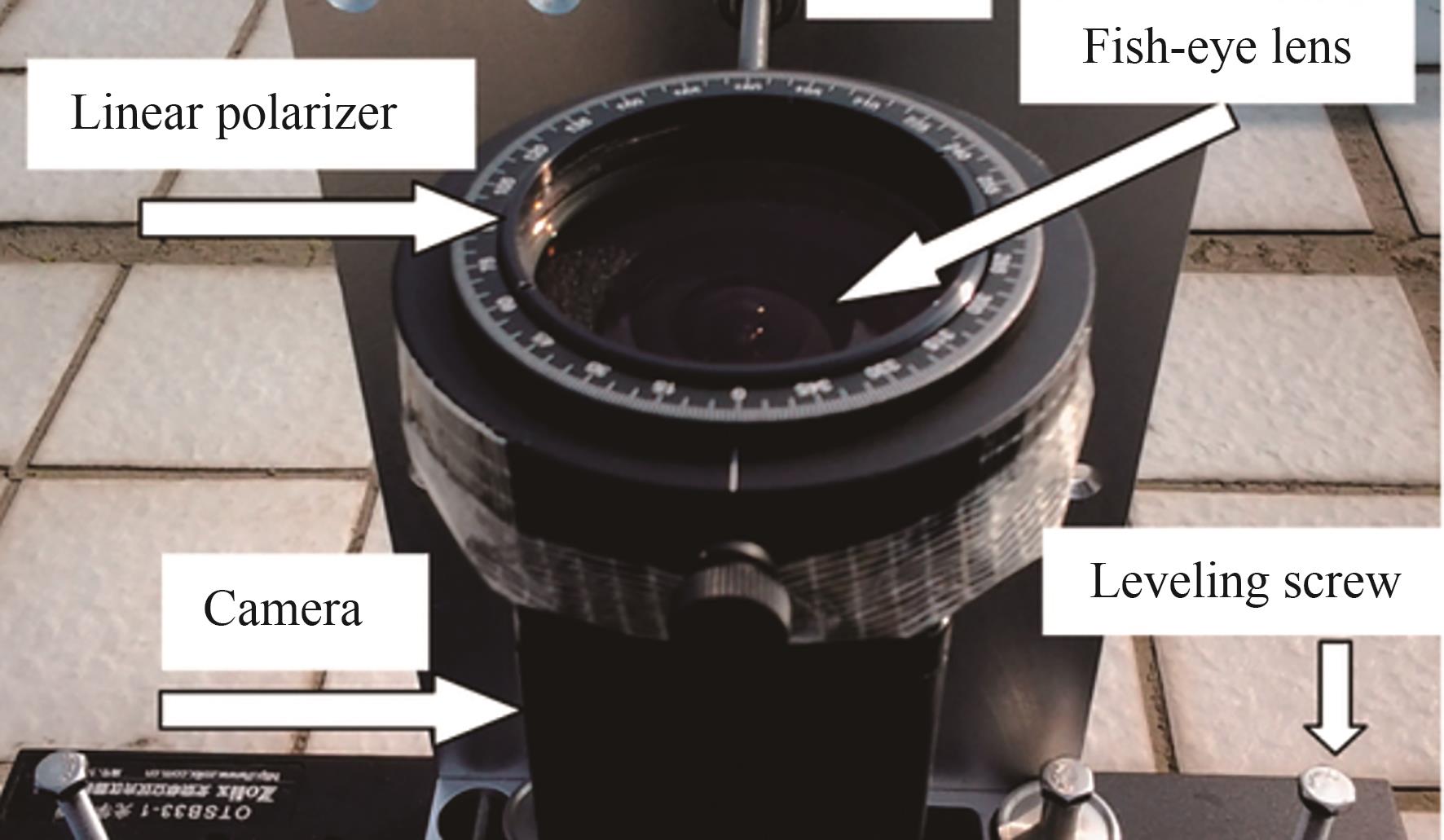

图 24
基于自由基对模型的仿生罗盘[182]
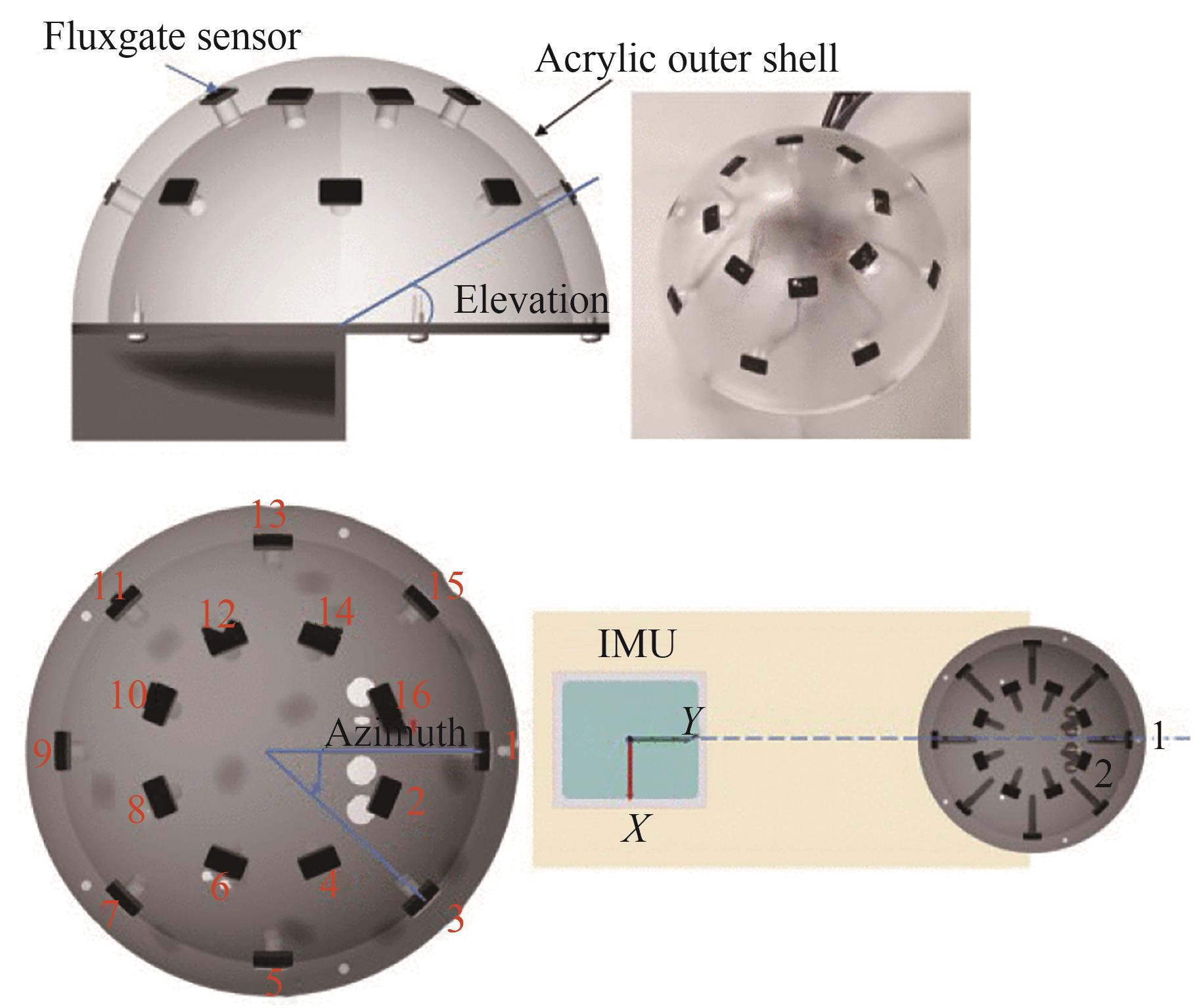
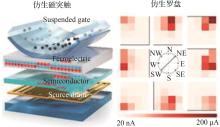
图 25
基于磁微粒模型的人工突触罗盘[183]


图26
事件相机与传统相机的输出对比[193]


图 27
Tianjic芯片的结构布局示意图[78]

表1
大规模神经形态芯片的功能与性能参数比较[203]
| 类别 | 拓扑 | 神经元 | 突触 | 面积/mm2 | 输出/SOPS | 功耗/mW | 能效GSOPS/W |
|---|---|---|---|---|---|---|---|
| Neurogrid[ | 树形 | 64 k | 256 k | 149 | N.A. | 169 | 1.1 |
| BrainScaleS[ | N.A. | 512 | 112 k | 49 | N.A. | N.A. | 10 |
| SpiNNaker[ | 六边形 | 18 k | 18 M | 88.4 | 64M | 1 000 | 64 |
| TrueNorth[ | 2D-mesh | 1 M | 256 M | 413 | 3G | 65 | 46 |
| Loihi[ | 2D-mesh | 128 k | 128 M | 60 | N.A. | N.A. | <42.4 |
| Tianjic[ | 2D-mesh | 39 k | 9.75 M | 14.44 | 608G | 937 | 649 |
| 1 | MOURITSEN H. Long-distance navigation and magnetoreception in migratory animals[J]. Nature, 2018, 558(7708): 50-59. |
| 2 | 曾毅, 刘成林, 谭铁牛. 类脑智能研究的回顾与展望[J]. 计算机学报, 2016, 39(1): 212-222. |
| ZENG Y, LIU C L, TAN T N. Retrospect and out-look of brain-inspired intelligence research[J]. Chinese Journal of Computers, 2016, 39(1): 212-222 (in Chinese). | |
| 3 | 徐波, 刘成林, 曾毅. 类脑智能研究现状与发展思考[J]. 中国科学院院刊, 2016, 31(7): 793-802. |
| XU B, LIU C L, ZENG Y. Research status and de-velopments of brain-inspired intelligence[J]. Bulletin of Chinese Academy of Sciences, 2016, 31(7): 793-802 (in Chinese). | |
| 4 | 余芳文. 面向三维环境的类脑同步定位与制图系统[D]. 武汉: 中国地质大学, 2020: 15-53. |
| YU F W. Brain inspired SLAM system for 3D envi-ronments[D]. Wuhan: China University of Geosci-ences, 2020: 15-53 (in Chinese). | |
| 5 | 杨闯, 刘建业, 熊智, 等. 由感知到动作决策一体化的类脑导航技术研究现状与未来发展[J]. 航空学报, 2020, 41(1): 023280. |
| YANG C, LIU J Y, XIONG Z, et al. Brain-inspired navigation technology integrating perception and action decision: A review and outlook[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(1): 023280 (in Chinese). | |
| 6 | O’KEEFE J, DOSTROVSKY J. The hippocampus as a spatial map: Preliminary evidence from unit activity in the freely-moving rat[J]. Brain Research, 1971, 34(1): 171-175. |
| 7 | HAFTING T, FYHN M, MOLDEN S, et al. Microstructure of a spatial map in the entorhinal cortex[J]. Nature, 2005, 436(7052): 801-806. |
| 8 | TAUBE J S, MULLER R U, RANCK J B JR. Head-direction cells recorded from the postsubiculum in freely moving rats. I[J] The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 1990, 10(2): 420-435. |
| 9 | ROWLAND D C, ROUDI Y, MOSER M B, et al. Ten years of grid cells [J]. Annual Review of Neuroscience, 2016, 39(1): 19-40. |
| 10 | MOSER E I, ROUDI Y, WITTER M P, et al. Grid cells and cortical representation[J]. Nature Reviews Neuroscience, 2014, 15(7): 466-481. |
| 11 | TUKKER J J, BEED P, BRECHT M, et al. Microcircuits for spatial coding in the medial entorhinal cortex[J]. Physiological Reviews, 2022, 102(2): 653-688. |
| 12 | CAPPAERT N L M, VAN STRIEN N M, WITTER M P. Chapter 20-hippocampal formation[M]∥ The Rat Nervous System (Fourth Edition). Amsterdam: Elsevier, 2015: 511-573. |
| 13 | KROPFF E, CARMICHAEL J E, MOSER M B, et al. Speed cells in the medial entorhinal cortex[J]. Nature, 2015, 523(7561): 419-424. |
| 14 | MACDONALD C J, LEPAGE K Q, EDEN U T, et al. Hippocampal “time cells” bridge the gap in memory for discontiguous events[J]. Neuron, 2011, 71(4): 737-749. |
| 15 | SOLSTAD T, BOCCARA C N, KROPFF E, et al. Representation of geometric borders in the entorhi-nal cortex[J]. Science, 2008, 322(5909): 1865-1868. |
| 16 | MOSER M B, ROWLAND D C, MOSER E I. Place cells, grid cells, and memory[J]. Cold Spring Harbor Perspectives in Biology, 2015, 7(2): a021808. |
| 17 | HORI E, NISHIO Y, KAZUI K, et al. Place-related neural responses in the monkey hippocampal formation in a virtual space[J]. Hippocampus, 2005, 15(8): 991-996. |
| 18 | EKSTROM A D, KAHANA M J, CAPLAN J B, et al. Cellular networks underlying human spatial navigation[J]. Nature, 2003, 425(6954): 184-188. |
| 19 | YARTSEV M M, ULANOVSKY N. Representation of three-dimensional space in the hippocampus of flying bats[J]. Science, 2013, 340(6130): 367-372. |
| 20 | WOHLGEMUTH M J, YU C, MOSS C F. 3D hippocampal place field dynamics in free-flying echolocating bats[J]. Frontiers in Cellular Neuroscience, 2018, 12:27. |
| 21 | GRIEVES R M, JEDIDI-AYOUB S, MISHCHANCHUK K, et al. The place-cell representation of volumetric space in rats[J]. Nature Communications, 2020, 11(1): 789. |
| 22 | KIM M, JEFFERY K J, MAGUIRE E A. Multivoxel pattern analysis reveals 3D place information in the human hippocampus[J]. The Journal of Neuroscience, 2017, 37(16): 4270-4279. |
| 23 | FINKELSTEIN A, LAS L, ULANOVSKY N. 3-D maps and compasses in the brain[J]. Annual Review of Neuroscience, 2016, 39(1): 171-196. |
| 24 | THOMPSON L T, BEST P J. Long-term stability of the place-field activity of single units recorded from the dorsal hippocampus of freely behaving rats[J]. Brain Research, 1990, 509(2): 299-308. |
| 25 | MULLER R U, KUBIE J L. The effects of changes in the environment on the spatial firing of hippocampal complex-spike cells[J]. The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 1987, 7(7): 1951-1968. |
| 26 | LEUTGEB S, LEUTGEB J K, BARNES C A, et al. Independent codes for spatial and episodic memory in hippocampal neuronal ensembles[J]. Science, 2005, 309(5734): 619-623. |
| 27 | RANCK J B JR. Head direction cells in the deep layer of dorsal presubiculum in freely moving rats[J]. Society of Neuroscience Abstract, 1984, 10: 599. |
| 28 | LONG X, YOUNG C K, ZHANG S J. Sharp tuning of head direction by somatosensory fast-spiking interneurons[DB/OL]. bioRxiv preprint: 2020.02.03.933143, 2020. |
| 29 | SARGOLINI F, FYHN M, HAFTING T, et al. Con-junctive representation of position, direction, and velocity in entorhinal cortex[J]. Science, 2006, 312(5774): 758-762. |
| 30 | TAUBE J S. The head direction signal: Origins and sensory-motor integration[J]. Annual Review of Neuroscience, 2007, 30: 181-207. |
| 31 | LACHANCE P A, DUMONT J R, OZEL P, et al. Commutative properties of head direction cells dur-ing locomotion in 3D: Are all routes equal?[J]. The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 2020, 40(15): 3035-3051. |
| 32 | FINKELSTEIN A, DERDIKMAN D, RUBIN A, et al. Three-dimensional head-direction coding in the bat brain[J]. Nature, 2015, 517(7533): 159-164. |
| 33 | FINKELSTEIN A, ULANOVSKY N, TSODYKS M, et al. Optimal dynamic coding by mixed-dimensionality neurons in the head-direction system of bats[J]. Nature Communications, 2018, 9(1): 3590. |
| 34 | KIM M, MAGUIRE E A. Encoding of 3D head direction information in the human brain[J]. Hippocampus, 2019, 29(7): 619-629. |
| 35 | APOSTEL A, ROSE J. Avian navigation: Head direction cells in the quail hippocampus[J]. Current Biology, 2021, 31(12): R781-R783. |
| 36 | STACKMAN R W, TULLMAN M L, TAUBE J S. Maintenance of rat head direction cell firing during locomotion in the vertical plane[J]. Journal of Neu-rophysiology, 2000, 83(1): 393-405. |
| 37 | YODER R M, TAUBE J S. The vestibular contribution to the head direction signal and navigation[J]. Frontiers in Integrative Neuroscience, 2014, 8:32. |
| 38 | TAUBE J S, MULLER R U, RANCK J B JR. Head-direction cells recorded from the postsubiculum in freely moving rats. II. Effects of environmental manipulations[J]. The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 1990, 10(2): 436-447. |
| 39 | RAUDIES F, BRANDON M P, CHAPMAN G W, et al. Head direction is coded more strongly than movement direction in a population of entorhinal neurons[J]. Brain Research, 2015, 1621: 355-367. |
| 40 | BOCCARA C N, SARGOLINI F, THORESEN V H, et al. Grid cells in pre- and parasubiculum[J]. Nature Neuroscience, 2010, 13(8): 987-994. |
| 41 | KILLIAN N J, JUTRAS M J, BUFFALO E A. A map of visual space in the primate entorhinal cortex[J]. Nature, 2012, 491(7426): 761-764. |
| 42 | YARTSEV M M, WITTER M P, ULANOVSKY N. Grid cells without theta oscillations in the entorhinal cortex of bats[J]. Nature, 2011, 479(7371): 103-107. |
| 43 | JACOBS J, WEIDEMANN C T, MILLER J F, et al. Direct recordings of grid-like neuronal activity in human spatial navigation[J]. Nature Neuroscience, 2013, 16(9): 1188-1190. |
| 44 | GINOSAR G, ALJADEFF J, BURAK Y, et al. Locally ordered representation of 3D space in the entorhinal cortex[J]. Nature, 2021, 596(7872): 404-409. |
| 45 | KIM M, MAGUIRE E A. Can we study 3D grid codes non-invasively in the human brain? Methodological considerations and fMRI findings[J]. NeuroImage, 2019, 186: 667-678. |
| 46 | STEMMLER M, MATHIS A, HERZ A V M. Connecting multiple spatial scales to decode the population activity of grid cells[J]. Science Advances, 2015, 1(11): e1500816. |
| 47 | STENSOLA H, STENSOLA T, SOLSTAD T, et al. The entorhinal grid map is discretized[J]. Nature, 2012, 492(7427): 72-78. |
| 48 | BARRY C, HAYMAN R, BURGESS N, et al. Experience-dependent rescaling of entorhinal grids[J]. Nature Neuroscience, 2007, 10(6): 682-684. |
| 49 | HARDCASTLE K, GANGULI S, GIOCOMO L M. Environmental boundaries as an error correction mechanism for grid cells[J]. Neuron, 2015, 86(3): 827-839. |
| 50 | SREENIVASAN S, FIETE I. Grid cells generate an analog error-correcting code for singularly precise neural computation[J]. Nature Neuroscience, 2011, 14(10): 1330-1337. |
| 51 | TOWSE B W, BARRY C, BUSH D, et al. Optimal configurations of spatial scale for grid cell firing under noise and uncertainty[J]. Philosophical Transactions of the Royal Society of London Series B, Biological Sciences, 2013, 369(1635): 20130290. |
| 52 | O’KEEFE J, BURGESS N, DONNETT J G, et al. Place cells, navigational accuracy, and the human hippocampus[J]. Philosophical Transactions of the Royal Society of London. Series B, Biological Sciences, 1998, 353(1373): 1333-1340. |
| 53 | JEFFERY K J. The Neurobiology of Spatial Behaviour[M]. Oxford: Oxford University Press, 2003. |
| 54 | WILLS T J, BARRY C, CACUCCI F. The abrupt development of adult-like grid cell firing in the medial entorhinal cortex[J]. Frontiers in Neural Circuits, 2012, 6: 21. |
| 55 | MALLORY C S, HARDCASTLE K, CAMPBELL M G, et al. Mouse entorhinal cortex encodes a diverse repertoire of self-motion signals[J]. Nature Communications, 2021, 12(1): 671. |
| 56 | SPALLA D, TREVES A, BOCCARA C N. Angular and linear speed cells in the parahippocampal circuits[J]. Nature Communications, 2022, 13(1): 1907. |
| 57 | VARGHA-KHADEM F, GADIAN D G, WATKINS K E, et al. Differential effects of early hippocampal pathology on episodic and semantic memory[J]. Science, 1997, 277(5324): 376-380. |
| 58 | KRAUS B J, ROBINSON R J 2nd, WHITE J A, et al. Hippocampal time cells: Time versus path integration[J]. Neuron, 2013, 78(6): 1090-1101. |
| 59 | SALZ D M, TIGANJ Z, KHASNABISH S, et al. Time cells in hippocampal area CA3[J]. Journal of Neuroscience, 2016, 36(28): 7476-7484. |
| 60 | KRAUS B J, BRANDON M P, ROBINSON R J, et al. During running in place, grid cells integrate elapsed time and distance run[J]. Neuron, 2015, 88(3): 578-589. |
| 61 | TSAO A, SUGAR J, LU L, et al. Integrating time from experience in the lateral entorhinal cortex[J]. Nature, 2018, 561(7721): 57-62. |
| 62 | AGHAJAN Z M, KREIMAN G, FRIED I. Minute-scale periodicity of neuronal firing in the human entorhinal cortex[M]. bioRxiv preprint: 2022.05.05.490703, 2022. |
| 63 | SHIMBO A, IZAWA E I, FUJISAWA S. Scalable representation of time in the hippocampus[J]. Science Advances, 2021, 7(6): eabd7013. |
| 64 | O’KEEFE J, BURGESS N. Geometric determinants of the place fields of hippocampal neurons[J]. Nature, 1996, 381(6581): 425-428. |
| 65 | SAVELLI F, YOGANARASIMHA D, KNIERIM J J. Influence of boundary removal on the spatial representations of the medial entorhinal cortex[J]. Hippocampus, 2008, 18(12): 1270-1282. |
| 66 | LEVER C, BURTON S, JEEWAJEE A, et al. Boundary vector cells in the Subiculum of the Hippocampal Formation[J]. The Journal of Neuroscience: the Official Journal of the Society for Neuroscience, 2009, 29(31): 9771-9777. |
| 67 | BJERKNES T L, MOSER E I, MOSER M B. Representation of geometric borders in the developing rat[J]. Neuron, 2014, 82(1): 71-78. |
| 68 | HINMAN J R, CHAPMAN G W, HASSELMO M E. Neuronal representation of environmental boundaries in egocentric coordinates[J]. Nature Communications, 2019, 10(1): 2772. |
| 69 | ALEXANDER A S, CARSTENSEN L C, HINMAN J R, et al. Egocentric boundary vector tuning of the retrosplenial cortex[J]. Science Advances, 2020, 6(8): eaaz2322. |
| 70 | LIAN Y, WILLIAMS S, ALEXANDER A S, et al. Learning the vector coding of egocentric boundary cells from visual data[DB/OL]. bioRxiv preprint: 2022.01.28.478267, 2022. |
| 71 | HØYDAL Ø A, SKYTØEN E R, ANDERSSON S O, et al. Object-vector coding in the medial entorhinal cortex[J]. Nature, 2019, 568(7752): 400-404. |
| 72 | WANG C, CHEN X J, KNIERIM J J. Egocentric and allocentric representations of space in the rodent brain[J]. Current Opinion in Neurobiology, 2020, 60: 12-20. |
| 73 | ROLLS E T. Spatial coordinate transforms linking the allocentric hippocampal and egocentric parietal primate brain systems for memory, action in space, and navigation[J]. Hippocampus, 2020, 30(4): 332-353. |
| 74 | BALL D, HEATH S, WILES J, et al. OpenRatSLAM: An open source brain-based SLAM system[J]. Autonomous Robots, 2013, 34(3): 149-176. |
| 75 | YU F W, SHANG J G, HU Y J, et al. NeuroSLAM: A brain-inspired SLAM system for 3D environments[J]. Biological Cybernetics, 2019, 113(5): 515-545. |
| 76 | WU S, WONG K Y M, FUNG C C A, et al Continuous attractor neural networks : Candidate of a canonical model for neural information representa-tion[J]. F1000Research, 2016, 5(16): 209-226. |
| 77 | BANINO A, BARRY C, URIA B, et al. Vector-based navigation using grid-like representations in artificial agents[J]. Nature, 2018, 557(7705): 429-433. |
| 78 | PEI J, DENG L, SONG S, et al. Towards artificial general intelligence with hybrid Tianjic chip architecture[J]. Nature, 2019, 572(7767): 106-111. |
| 79 | 斯白露, 罗壹凡. 空间记忆与类脑导航研究进展[J]. 人工智能, 2020, 7(1): 16-31. |
| SI B L, LUO Y F. Research progress of spatial memory and brain-like navigation[J]. AI-View, 2020, 7(1): 16-31 (in Chinese). | |
| 80 | BURGESS N, BARRY C, O’KEEFE J. An oscillatory interference model of grid cell firing[J]. Hippocampus, 2007, 17(9): 801-812. |
| 81 | BURGESS N. Grid cells and theta as oscillatory interference: Theory and predictions[J]. Hippocampus, 2008, 18(12): 1157-1174. |
| 82 | BUSH D, BARRY C, MANSON D, et al. Using grid cells for navigation[J]. Neuron, 2015, 87(3): 507-520. |
| 83 | FIETE I R, BURAK Y, BROOKINGS T. What grid cells convey about rat location[J]. Journal of Neuroscience, 2008, 28(27): 6858-6871. |
| 84 | 杨闯, 刘建业, 熊智, 等. 基于多尺度网格细胞模型的无人机类脑矢量导航方法[J]. 中国惯性技术学报, 2020, 28(2): 179-185. |
| YANG C, LIU J Y, XIONG Z, et al. Brain-inspired vector navigation method based on model of multi-scale grid cells[J]. Journal of Chinese Inertial Technology, 2020, 28(2): 179-185 (in Chinese). | |
| 85 | 谷雨, 赵修斌, 代传金. 基于网格细胞模型的类脑大尺度空间矢量导航方法[J]. 控制理论与应用, 2021, 38(12): 2094-2100. |
| GU Y, ZHAO X B, DAI C J. Brain-like large-scale spatial vector navigation method based on grid cell model[J]. Control Theory & Applications, 2021, 38(12): 2094-2100 (in Chinese). | |
| 86 | CANTERO J L, ATIENZA M, STICKGOLD R, et al. Sleep-dependent θ oscillations in the human hippo-campus and neocortex[J]. The Journal of Neuroscience, 2003, 23(34): 10897-10903. |
| 87 | ZILLI E A, YOSHIDA M, TAHVILDARI B, et al. Evaluation of the oscillatory interference model of grid cell firing through analysis and measured period variance of some biological oscillators[J]. PLoS Computational Biology, 2009, 5(11): e1000573. |
| 88 | AMARI S I. Dynamics of pattern formation in lateral-inhibition type neural fields[J]. Biological Cybernetics, 1977, 27(2): 77-87. |
| 89 | BEN-YISHAI R, BAR-OR R L, SOMPOLINSKY H. Theory of orientation tuning in visual cortex.[J]. Proceedings of the National Academy of Sciences of the United States of America, 1995, 92(9): 3844-3848. |
| 90 | MI Y Y, KATKOV M, TSODYKS M. Synaptic correlates of working memory capacity[J]. Neuron, 2017, 93(2): 323-330. |
| 91 | ZHANG K. Representation of spatial orientation by the intrinsic dynamics of the head-direction cell ensemble: A theory[J]. The Journal of Neuroscience, 1996, 16(6): 2112-2126. |
| 92 | GOODRIDGE J P, TOURETZKY D S. Modeling attractor deformation in the rodent head-direction system[J]. Journal of Neurophysiology, 2000, 83(6): 3402-3410. |
| 93 | BATTAGLIA F P, TREVES A. Attractor neural networks storing multiple space representations: A model for hippocampal place fields[J]. Physical Review E, 1998, 58(6): 7738-7753. |
| 94 | TSODYKS M. Attractor neural network models of spatial maps in hippocampus[J]. Hippocampus, 1999, 9(4): 481-489. |
| 95 | STRINGER S M, TRAPPENBERG T P, ROLLS E T, et al. Self-organizing continuous attractor networks and path integration: One-dimensional models of head direction cells[J]. Network: Computation in Neural Systems, 2002, 13(2): 217-242. |
| 96 | WITTER M P, MOSER E I. Spatial representation and the architecture of the entorhinal cortex[J]. Trends in Neurosciences, 2006, 29(12): 671-678. |
| 97 | BURAK Y, FIETE I R. Accurate path integration in continuous attractor network models of grid cells[J]. PLoS Computational Biology, 2009, 5(2): e1000291. |
| 98 | YOON K, BUICE M A, BARRY C, et al. Specific evidence of low-dimensional continuous attractor dynamics in grid cells[J]. Nature Neuroscience, 2013, 16(8): 1077-1084. |
| 99 | MILFORD M J, WYETH G F, PRASSER D. RatSLAM: A hippocampal model for simultaneous localization and mapping[C]∥ IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA’04. Piscataway: IEEE Press, 2004: 403-408. |
| 100 | MILFORD M J, PRASSER D, WYETH G. Experience mapping: Producing spatially continuous environment representations using RatSLAM[C]∥ Proceedings of the 2005 Australasian Confer-ence on Robotics and Automation, ACRA 2005, 2005: 1-11. |
| 101 | MILFORD M J, WYETH G F. Mapping a suburb with a single camera using a bio-logically inspired SLAM system[J]. IEEE Transactions on Robotics, 2008, 24(5): 1038-1053. |
| 102 | MILFORD M, WYETH G. Persistent navigation and mapping using a biologically inspired SLAM system[J]. The International Journal of Robotics Research, 2010, 29(9): 1131-1153. |
| 103 | STECKEL J, PEREMANS H. BatSLAM: Simultaneous localization and mapping using biomimetic sonar[J]. PLoS One, 2013, 8(1): e54076. |
| 104 | JACOBSON A, CHEN Z T, MILFORD M. Auton-omous multisensor calibration and closed-loop fusion for SLAM[J]. Journal of Field Robotics, 2015, 32(1): 85-122. |
| 105 | ÇATAL O, JANSEN W, VERBELEN T, et al. LatentSLAM: Unsupervised multi-sensor representation learning for localization and mapping[C]∥ 2021 IEEE International Conference on Robotics and Automation (ICRA). Piscataway: IEEE Press, 2021: 6739-6745. |
| 106 | YUAN M L, TIAN B, SHIM V A, et al. An entorhi-nal-hippocampal model for simultaneous cognitive map building[C]∥ Proceedings of the AAAI Conference on Artificial Intelligence, 2015. |
| 107 | MULAS M, WANIEK N, CONRADT J. Hebbian plasticity realigns grid cell activity with external sensory cues in continuous attractor models[J]. Frontiers in Computational Neuroscience, 2016, 10:13. |
| 108 | ZENG T P, SI B L. Cognitive mapping based on conjunctive representations of space and movement[J]. Frontiers in Neurorobotics, 2017, 11: 61. |
| 109 | 于乃功, 苑云鹤, 李倜, 等. 一种基于海马认知机理的仿生机器人认知地图构建方法[J]. 自动化学报, 2018, 44(1): 52-73. |
| YU N G, YUAN Y H, LI T, et al. A cognitive map building algorithm by means of cognitive mechanism of hippocampus[J]. Acta Automatica Sinica, 2018, 44(1): 52-73 (in Chinese). | |
| 110 | KRUPIC J, BURGESS N, O’KEEFE J. Neural representations of location composed of spatially periodic bands[J]. Science, 2012, 337(6096): 853-857. |
| 111 | SILVEIRA L, GUTH F, DREWS-JR P, et al. An open-source bio-inspired solution to underwater SLAM[J]. IFAC-PapersOnLine, 2015, 48(2): 212-217. |
| 112 | YANG C, XIONG Z, LIU J Y, et al. A path integra-tion approach based on multiscale grid cells for large-scale navigation[J]. IEEE Transactions on Cognitive and Developmental Systems, 2022, 14(3): 1009-1020. |
| 113 | MNIH V, KAVUKCUOGLU K, SILVER D, et al. Human-level control through deep reinforcement learning[J]. Nature, 2015, 518(7540): 529-533. |
| 114 | SUN R, HSU L T, XUE D, et al. SUN R, HSU L T, XUE D B,et al. GPS signal reception classification using adaptive neuro-fuzzy inference system[J]. Journal of Navigation, 2019, 72(3): 685-701. |
| 115 | PHAN Q H, TAN S L, MCLOUGHLIN I, et al. A unified framework for GPS code and carrier-phase multipath mitigation using support vector regression[J]. Advances in Artificial Neural Systems, 2013, 2013: 1-14. |
| 116 | QUAN Y M, LAU L, ROBERTS G W, et al. Convo-lutional neural network based multipath detection method for static and kinematic GPS high precision positioning[J]. Remote Sensing, 2018, 10(12): 2052. |
| 117 | SUN R, WANG G Y, ZHANG W Y, et al. A gradient boosting decision tree based GPS signal reception classification algorithm[J]. Applied Soft Computing, 2020, 86: 105942. |
| 118 | SÜNDERHAUF N, SHIRAZI S, DAYOUB F, et al. On the performance of ConvNet features for place recognition[C]∥ 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2015: 4297-4304. |
| 119 | DING L, FENG C. DeepMapping: Unsupervised map estimation from multiple point clouds[C]∥ 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR). Piscataway: IEEE Press, 2020: 8642-8651. |
| 120 | LI J X, TANG H J, YAN R. A hybrid loop closure detection method based on brain-inspired models[J]. IEEE Transactions on Cognitive and Developmental Systems, 2022, 14(4): 1532-1543. |
| 121 | 杨元喜, 杨诚, 任夏. PNT智能服务[J]. 测绘学报, 2021, 50(08): 1006-1012. |
| YANG Y X, YANG C, REN X. PNT intelligent services[J]. Acta Geodaetica et Cartographica Sinica, 2021, 50 (8): 1006-1012 (in Chinese). | |
| 122 | 刘经南, 罗亚荣, 郭迟, 等. PNT智能与智能PNT[J]. 测绘学报, 2022, 51(6): 811-828. |
| LIU J N, LUO Y R, GUO C, et al. PNT intelligence and intelligent PNT[J]. Acta Geodaetica et Carto-graphica Sinica, 2022, 51(6): 811-828 (in Chinese). | |
| 123 | ARLEO A, GERSTNER W. Spatial cognition and neuro-mimetic navigation: A model of hippocampal place cell activity[J]. Biological Cybernetics, 2000, 83(3): 287-299. |
| 124 | KANITSCHEIDER I, FIETE I. Training recurrent networks to generate hypotheses about how the brain solves hard navigation problems[C]∥ Proceedings of the 31st International Conference on Neural Infor-mation Processing Systems. New York: ACM, 2017: 4532-4541. |
| 125 | CUEVA C J, WEI X X. Emergence of grid-like representations by training recurrent neural networks to perform spatial localization[DB/OL]. arXiv preprint: 1803.07770, 2018. |
| 126 | ROSENBAUM D, BESSE F, VIOLA F, et al. Learn-ing models for visual 3D localization with implicit mapping[DB/OL]. arXiv preprint: 1807.03149, 2018. |
| 127 | MAI G, JANOWICZ K, YAN B, et al. Multi-scale representation learning for spatial feature distributions using grid cells[DB/OL]. arXiv preprint: 2003.00824, 2020. |
| 128 | BEECHING E, DIBANGOYE J, SIMONIN O, et al. EgoMap: Projective mapping and structured egocentric memory for deep RL[C]∥ Joint European Conference on Machine Learning and Knowledge Discovery in Databases. Cham: Springer International Publishing, 2021: 525-540. |
| 129 | 郭迟, 罗宾汉, 李飞, 等. 类脑导航算法:综述与验证[J]. 武汉大学学报(信息科学版), 2021, 46(12): 1819-1831. |
| GUO C, LUO B H, LI F, et al. Review and verifica-tion for brain-like navigation algorithm[J]. Geomatics and Information Science of Wuhan University, 2021, 46(12): 1819-1831 (in Chinese). | |
| 130 | FÖRSTER A, GRAVES A, SCHMIDHUBER J. RNN-based learning of compact maps for efficient robot localization[C]∥ 15 th European Symposium on Artificial Neural Networks, 2007. |
| 131 | MOHAMMADI M, AL-FUQAHA A, GUIZANI M, et al. Semisupervised deep reinforcement learning in sup-port of IoT and smart city services[J]. IEEE Internet of Things Journal, 2018, 5(2): 624-635. |
| 132 | LOQUERCIO A, KAUFMANN E, RANFTL R, et al. Learning high-speed flight in the wild[J]. Science Robotics, 2021, 6(59): eabg5810. |
| 133 | MIROWSKI P, GRIMES M K, MALINOWSKI M, et al. Learning to navigate in cities without a map[DB/OL]. arXiv preprint: 1804.00168, 2018. |
| 134 | GU Y, CHEN Y Q, LIU J F, et al. Semi-supervised deep extreme learning machine for Wi-Fi based localization[J]. Neurocomputing, 2015, 166: 282-293. |
| 135 | ZHANG W, LIU K, ZHANG W D, et al. Deep Neural Networks for wireless localization in indoor and outdoor environments[J]. Neurocomputing, 2016, 194: 279-287. |
| 136 | LUO J H, GAO H B. Deep belief networks for fingerprinting indoor localization using ultrawideband technology[J]. International Journal of Distributed Sensor Networks, 2016, 12(1): 5840916. |
| 137 | SAVELLI F, KNIERIM J J. AI mimics brain codes for navigation[J]. Nature, 2018, 557(7705): 313-314. |
| 138 | MAASS W. Networks of spiking neurons: The third generation of neural network models[J]. Neural Networks, 1997, 10(9): 1659-1671. |
| 139 | TAVANAEI A, GHODRATI M, KHERADPISHEH S R, et al. Deep learning in spiking neural networks[J]. Neural Networks, 2019, 111: 47-63. |
| 140 | VANRULLEN R, GUYONNEAU R, THORPE S J. Spike times make sense[J]. Trends in Neurosciences, 2005, 28(1): 1-4. |
| 141 | WOLFE J, HOUWELING A R, BRECHT M. Sparse and powerful cortical spikes[J]. Current Opinion in Neurobiology, 2010, 20(3): 306-312. |
| 142 | ROY K, JAISWAL A, PANDA P. Towards spike-based machine intelligence with neuromorphic computing[J]. Nature, 2019, 575(7784): 607-617. |
| 143 | ZHANG W R, LI P. Spike-train level backpropaga-tion for training deep recurrent spiking neural net-works[DB/OL]. arXiv preprint: 1908.06378, 2019. |
| 144 | DONG M, HUANG X H, XU B. Unsupervised speech recognition through spike-timing-dependent plasticity in a convolutional spiking neural net-work[J]. PLoS One, 2018, 13(11): e0204596. |
| 145 | WANG X Q, HOU Z G, ZOU A M, et al. A behavior controller based on spiking neural networks for mo-bile robots[J]. Neurocomputing, 2008, 71(4-6): 655-666. |
| 146 | WANG X Q, HOU Z G, LV F, et al. Mobile robots’ modular navigation controller using spiking neural networks[J]. Neurocomputing, 2014, 134: 230-238. |
| 147 | NICHOLS E, MCDAID L J, SIDDIQUE N. Biolog-ically inspired SNN for robot control[J]. IEEE Transactions on Cybernetics, 2013, 43(1): 115-128. |
| 148 | SHIM M S, LI P. Biologically inspired reinforcement learning for mobile robot collision avoidance[C]∥ 2017 International Joint Conference on Neural Networks (IJCNN). Piscataway: IEEE Press, 2017: 3098-3105. |
| 149 | SHALUMOV A, HALALY R, TSUR E E. LiDAR-driven spiking neural network for collision avoidance in autonomous driving[J]. Bioinspiration & Biomimetics, 2021, 16(6): 066016. |
| 150 | JIMENEZ-ROMERO C, SOUSA-RODRIGUES D, JOHNSON J H, et al. A model for foraging ants, controlled by spiking neural networks and double pheromones[DB/OL]. arXiv preprint: 1507.08467, 2015. |
| 151 | JIMENEZ-ROMERO C, SOUSA-RODRIGUES D, JOHNSON J H. Designing behaviour in bio-inspired robots using associative topologies of spik-ing-neural-networks[DB/OL]. arXiv preprint: 1509.07035, 2015. |
| 152 | JIMENEZA⁃ROMERO C. A heterosynaptic spiking neural system for the development of autonomous agents[D]. London: Open University, 2017. |
| 153 | HUSSAINI S, MILFORD M, FISCHER T. Spiking neural networks for visual place recognition via weighted neuronal assignments[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 4094-4101. |
| 154 | YANG S M, TAN J T, CHEN B D. Robust spike-based continual meta-learning improved by restricted minimum error entropy criterion[J]. Entropy, 2022, 24(4): 455. |
| 155 | POTJANS W, MORRISON A, DIESMANN M. A spiking neural network model of an actor-critic learning agent[J]. Neural Computation, 2009, 21(2): 301-339. |
| 156 | FRÉMAUX N, SPREKELER H, GERSTNER W. Reinforcement learning using a continuous time actor-critic framework with spiking neurons[J]. PLoS Computational Biology, 2013, 9(4): e1003024. |
| 157 | ZENNIR M N, BENMOHAMMED M, BOUDJADJA R. Spike-time dependant plasticity in a spiking neural network for robot path planning[C]∥ AIAI Workshops. 2015: 2-13. |
| 158 | RUECKERT E, KAPPEL D, TANNEBERG D, et al. Recurrent spiking networks solve planning tasks[J]. Scientific Reports, 2016, 6: 21142. |
| 159 | FRIEDRICH J, LENGYEL M. Goal-directed decision making with spiking neurons[J]. The Journal of Neuroscience, 2016, 36: 1529-1546. |
| 160 | XING D P, LI J L, ZHANG T L, et al. A brain-inspired approach for collision-free movement planning in the small operational space[J]. IEEE Transactions on Neural Networks and Learning Systems, 2022, 33(5): 2094-2105. |
| 161 | STEFFEN L, SILVA R K DA, ULBRICH S, et al. Networks of place cells for representing 3D envi-ronments and path planning[C]∥ 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob). Piscataway: IEEE Press, 2020: 1158-1165. |
| 162 | KREISER R, RENNER A, SANDAMIRSKAYA Y, et al. Pose estimation and map formation with spiking neural networks: Towards neuromorphic SLAM[C]∥ 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2019: 2159-2166. |
| 163 | KREISER R, CARTIGLIA M, MARTEL J N P, et al. A neuromorphic approach to path integration: A head-direction spiking neural network with vision-driven reset[C]∥ 2018 IEEE International Symposium on Circuits and Systems (ISCAS). Piscataway: IEEE Press, 2018: 1-5. |
| 164 | YAO H Y, HUANG H P, HUANG Y C, et al. Fly-intel-a platform for robot navigation based on a brain-inspired spiking neural network[C]∥ 2019 IEEE International Conference on Artificial Intelligence Circuits and Systems (AICAS). Piscataway: IEEE Press, 2019: 219-220. |
| 165 | TANG G Z, KUMAR N, MICHMIZOS K P. Rein-forcement co-learning of deep and spiking neural networks for energy-efficient mapless navigation with neuromorphic hardware[C]∥ 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). Piscataway: IEEE Press, 2021: 6090-6097. |
| 166 | KISHORE A, SARASWAT V, GANGULY U. Sim-plified klinokinesis using spiking neural networks for resource-constrained navigation on the N euromorphic processor loihi[C]∥ 2021 International Joint Conference on Neural Networks (IJCNN). Piscataway: IEEE Press, 2021: 1-8. |
| 167 | FRICKER P, CHAUHAN T, HURTER C, et al. Event-based extraction of navigation features from unsupervised learning of optic flow patterns[C]∥ Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications. SCITEPRESS - Science and Technology Publications, 2022: 702-710. |
| 168 | GEVA-SAGIV M, LAS L, YOVEL Y, et al. Spatial cognition in bats and rats: From sensory acquisition to multiscale maps and navigation[J]. Nature Reviews Neuroscience, 2015, 16(2): 94-108. |
| 169 | YANG Q, LI M J, BIAN H, et al. Bioinspired artifi-cial compound eyes: Characteristic, fabrication, and application[J]. Advanced Materials Technologies, 2021, 6(10): 2100091. |
| 170 | TANIDA J, KUMAGAI T, YAMADA K, et al. Thin observation module by bound optics (TOMBO): An optoelectronic image capturing system[C]∥ Proc SPIE 4089, Optics in Computing 2000, 2000: 1030-1036. |
| 171 | JEONG K H, KIM J, LEE L P. Biologically inspired artificial compound eyes[J]. Science, 2006, 312(5773): 557-561. |
| 172 | LI Z W, XIAO J L. Mechanics and optics of stretch-able elastomeric microlens array for artificial compound eye camera[J]. Journal of Applied Physics, 2015, 117(1): 014904. |
| 173 | LEE W B, JANG H, PARK S, et al. COMPU-EYE: A high resolution computational compound eye[J]. Optics Express, 2016, 24(3): 2013-2026. |
| 174 | WU S D, JIANG T, ZHANG G X, et al. Artificial compound eye: A survey of the state-of-the-art[J]. Artificial Intelligence Review, 2017, 48(4): 573-603. |
| 175 | LAMBRINOS D, MÖLLER R, LABHART T, et al. A mobile robot employing insect strategies for navigation[J]. Robotics and Autonomous Systems, 2000, 30(1-2): 39-64. |
| 176 | WANG Y J, HU X P, LIAN J X, et al. Design of a device for sky light polarization measurements[J]. Sensors, 2014, 14(8): 14916-14931. |
| 177 | 胡小平, 毛军, 范晨, 等. 仿生导航技术综述[J]. 导航定位与授时, 2020, 7(4): 1-10. |
| HU X P, MAO J, FAN C, et al. Bionic navigation technology: A survey[J]. Navigation Positioning and Timing, 2020, 7(4): 1-10 (in Chinese). | |
| 178 | WANG Y J, HU X P, ZHANG L L, et al. Polarized light compass-aided visual-inertial navigation under foliage environment[J]. IEEE Sensors Journal, 2017, 17(17): 5646-5653. |
| 179 | ZHAO H J, XU W J, ZHANG Y, et al. Polarization patterns under different sky conditions and a navigation method based on the symmetry of the AOP map of skylight[J]. Optics Express, 2018, 26(22): 28589-28603. |
| 180 | 王玉杰, 胡小平, 练军想, 等. 仿生偏振光定向算法及误差分析[J]. 宇航学报, 2015, 36(2): 211-216. |
| WANG Y J, HU X P, LIAN J X, et al. Algorithms and error analysis of bionic orientation based on polarized light[J]. Journal of Astronautics, 2015, 36(2): 211-216 (in Chinese). | |
| 181 | WANG Y J, HU X P, LIAN J X, et al. Bionic orien-tation and visual enhancement with a novel polarization camera[J]. IEEE Sensors Journal, 2017, 17(5): 1316-1324. |
| 182 | LI Z Y, YU H P, SHEN T S, et al. Bionic magnetic compass algorithm based on radical pair theory[J]. IEEE Sensors Journal, 2022, 22(24): 23812-23820. |
| 183 | KIM Y, LEE K, LEE J, et al. Bird-inspired self-navigating artificial synaptic compass[J]. ACS Nano, 2021, 15(12): 20116-20126. |
| 184 | QIN S Y, YIN H, YANG C L, et al. A magnetic protein biocompass[J]. Nature Materials, 2016, 15(2): 217-226. |
| 185 | LIU X, SONG W J, WU M, et al. Magnetoelectric phase transition driven by interfacial-engineered Dzyaloshinskii-Moriya interaction[J]. Nature Communications, 2021, 12(1): 5453. |
| 186 | ZHANG J Y, ZHANG T, SHIN H S, et al. Geomag-netic gradient-assisted evolutionary algorithm for long-range underwater navigation[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: 1-12. |
| 187 | LICHTSTEINER P, POSCH C, DELBRUCK T. A 128×128 120 dB 15 μs latency asynchronous tem-poral contrast vision sensor[J]. IEEE Journal of Solid-State Circuits, 2008, 43(2): 566-576. |
| 188 | POSCH C, MATOLIN D, WOHLGENANNT R. A QVGA 143dB dynamic range asynchronous address-event PWM dynamic image sensor with lossless pixel-level video compression[C]∥ 2010 IEEE International Solid-State Circuits Conference - (ISSCC). Piscataway: IEEE Press, 2010: 400-401. |
| 189 | BRANDLI C, MULLER L, DELBRUCK T. Real-time, high-speed video decompression using a frame- and event-based DAVIS sensor[C]∥ 2014 IEEE International Symposium on Circuits and Systems (ISCAS). Piscataway: IEEE Press, 2014: 686-689. |
| 190 | CHEN S, GUO M. Live Demonstration: CeleX-V: A 1M pixel multi-mode event-based sensor[C]∥ 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW). Piscataway: IEEE Press, 2020: 1682-1683. |
| 191 | DONG S W, HUANG T J, TIAN Y H. Spike camera and its coding methods[C]∥ 2017 Data Compression Conference (DCC). Piscataway: IEEE Press, 2017: 437. |
| 192 | STEFFEN L, REICHARD D, WEINLAND J, et al. Neuromorphic stereo vision: A survey of bio-inspired sensors and algorithms[J]. Frontiers in Neu-rorobotics, 2019, 13: 28. |
| 193 | MUEGGLER E, HUBER B, SCARAMUZZA D. Event-based, 6-DOF pose tracking for high-speed maneuvers[C]∥ 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE Press, 2014: 2761-2768. |
| 194 | 李家宁, 田永鸿. 神经形态视觉传感器的研究进展及应用综述[J]. 计算机学报, 2021, 44(6): 1258-1286. |
| LI J N, TIAN Y H. Recent advances in neuromor-phic vision sensors: A survey[J]. Chinese Journal of Computers, 2021, 44(6): 1258-1286 (in Chinese). | |
| 195 | WU W C, SCHENATO L, WOOD R J, et al. Biomimetic sensor suite for flight control of a micromechanical flying insect: Design and experimental results[C]∥ 2003 IEEE International Conference on Robotics and Automation (Cat. No.03CH37422). Piscataway: IEEE Press, 2003: 1146-1151. |
| 196 | 邓磊. 异构融合类脑计算平台的计算模型与关键技术研究[D]. 北京: 清华大学, 2017: 2-18. |
| DENG L. Towards the computational model and key technologies on heterogeneous brain-inspired com-puting platform[D]. Beijing: Tsinghua University, 2017: 2-18 (in Chinese). | |
| 197 | HAN S, LIU X Y, MAO H Z, et al. EIE: efficient inference engine on compressed deep neural network[C]∥ 2016 ACM/IEEE 43rd Annual International Symposium on Computer Architecture (ISCA). Piscataway: IEEE Press, 2016: 243-254. |
| 198 | BENJAMIN B V, GAO P R, MCQUINN E, et al. Neurogrid: A mixed-analog-digital multichip system for large-scale neural simulations[J]. Proceedings of the IEEE, 2014, 102(5): 699-716. |
| 199 | SCHEMMEL J, BRÜDERLE D, GRÜBL A, et al. A wafer-scale neuromorphic hardware system for large-scale neural modeling[C]∥ 2010 IEEE International Symposium on Circuits and Systems (ISCAS). Piscataway: IEEE Press, 2010: 1947-1950. |
| 200 | FURBER S B, GALLUPPI F, TEMPLE S, et al. The SpiNNaker Project[J]. Proceedings of the IEEE, 2014, 102(5): 652-665. |
| 201 | AKOPYAN F, SAWADA J, CASSIDY A, et al. TrueNorth: Design and tool flow of a 65 mW 1 million neuron programmable neurosynaptic chip[J]. IEEE Transactions on Computer-Aided Design of Integrated Circuits and Systems, 2015, 34(10): 1537-1557. |
| 202 | DAVIES M, SRINIVASA N, LIN T H, et al. Loihi: A neuromorphic manycore processor with on-chip learning[J]. IEEE Micro, 2018, 38(1): 82-99. |
| 203 | Spiking neural network integrated circuits: A review of trends and future directions[C]∥ 2022 IEEE Custom Integrated Circuits Conference (CICC). Piscataway: IEEE Press, 2022: 1-8. |
| 204 | HWU T, ISBELL J, OROS N, et al. A self-driving robot using deep convolutional neural networks on neuromorphic hardware[C]∥ 2017 International Joint Conference on Neural Networks (IJCNN). Piscataway: IEEE Press, 2017: 635-641. |
| 205 | ALLISON S L, FAGAN A M, MORRIS J C, et al. Spatial navigation in preclinical Alzheimer’s dis-ease[J]. Journal of Alzheimer’s Disease: JAD, 2016, 52(1): 77-90. |
| 206 | SENDHOFF B. Creating brain-like intelligence: From basic principles to complex intelligent systems[M]. Berlin: Springer, 2009. |
| 207 | SMITH L, GASSER M. The development of em-bodied cognition: Six lessons from babies[J]. Artifi-cial Life, 2005, 11(1-2): 13-29. |
| 208 | 文超, 马涛, 王偲, 等. 昆虫复眼结构及视觉导航研究进展[J]. 应用昆虫学报, 2019, 56(1): 28-36. |
| WEN C, MA T, WANG C, et al. Progress in research on the compound eye structure and visual navigation of insects[J]. Chinese Journal of Applied Entomology, 2019, 56(1): 28-36 (in Chinese). | |
| 209 | 吴军, 王玲容, 黄明益, 等. 多几何约束下的鱼眼相机单像高精度标定[J]. 光学学报, 2018, 38(11): 199-210. |
| WU J, WANG L R, HUANG M Y, et al. High preci-sion calibration of fisheye camera with single image under multiple geometric constraints[J]. Acta Optica Sinica, 2018, 38(11): 199-210 (in Chinese). |
| [1] | 张鸿林, 罗建军, 马卫华. 基于机器学习的航天器规避目标威胁博弈决策[J]. 航空学报, 2024, 45(8): 329136-329136. |
| [2] | 蔡云鹏, 周大鹏, 丁江川. 具有防撞安全约束的无人机集群智能协同控制[J]. 航空学报, 2024, 45(5): 529683-529683. |
| [3] | 单圣哲, 张伟伟. 基于自博弈深度强化学习的空战智能决策方法[J]. 航空学报, 2024, 45(4): 328723-328723. |
| [4] | 倪炜霖, 王永海, 徐聪, 赤丰华, 梁海朝. 基于强化学习的高超飞行器协同博弈制导方法[J]. 航空学报, 2023, 44(S2): 729400-729400. |
| [5] | 王雪鉴, 文永明, 石晓荣, 张宁宁, 刘洁玺. 多智能体多耦合任务混合式智能决策架构设计[J]. 航空学报, 2023, 44(S2): 729770-729770. |
| [6] | 高锡珍, 汤亮, 黄煌. 深度强化学习技术在地外探测自主操控中的应用与挑战[J]. 航空学报, 2023, 44(6): 26762-026762. |
| [7] | 周攀, 黄江涛, 章胜, 刘刚, 舒博文, 唐骥罡. 基于深度强化学习的智能空战决策与仿真[J]. 航空学报, 2023, 44(4): 126731-126731. |
| [8] | 董磊, 陈泓兵, 陈曦, 赵长啸. 基于DQN的单一飞行员驾驶模式分布式多智能体联盟任务分配策略[J]. 航空学报, 2023, 44(13): 327895-327895. |
| [9] | 陈文雪, 高长生, 荆武兴. 拦截机动目标的信赖域策略优化制导算法[J]. 航空学报, 2023, 44(11): 327596-327596. |
| [10] | 章胜, 周攀, 何扬, 黄江涛, 刘刚, 唐骥罡, 贾怀智, 杜昕. 基于深度强化学习的空战机动决策试验[J]. 航空学报, 2023, 44(10): 128094-128094. |
| [11] | 任峰, 高传强, 唐辉. 机器学习在流动控制领域的应用及发展趋势[J]. 航空学报, 2021, 42(4): 524686-524686. |
| [12] | 相晓嘉, 闫超, 王菖, 尹栋. 基于深度强化学习的固定翼无人机编队协调控制方法[J]. 航空学报, 2021, 42(4): 524009-524009. |
| [13] | 刘冰雁, 叶雄兵, 周赤非, 刘必鎏. 基于改进DQN的复合模式在轨服务资源分配[J]. 航空学报, 2020, 41(5): 323630-323630. |
| [14] | 张耀中, 许佳林, 姚康佳, 刘洁凌. 基于DDPG算法的无人机集群追击任务[J]. 航空学报, 2020, 41(10): 324000-324000. |
| [15] | 刘冰雁, 叶雄兵, 高勇, 王新波, 倪蕾. 基于分支深度强化学习的非合作目标追逃博弈策略求解[J]. 航空学报, 2020, 41(10): 324040-324040. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
版权所有 © 航空学报编辑部
版权所有 © 2011航空学报杂志社
主管单位:中国科学技术协会 主办单位:中国航空学会 北京航空航天大学